Modelarski regulator dwukierunkowy
Przy okazji budowy modelu pływającego, postanowiłem odświeżyć nieco układ dwukierunkowego regulatora obrotów szczotkowego silnika prądu stałego. Sercem układu pozostała dobrze znana ATmega8. Dostępna jest także wersja dla ATmega328.
Podstawowe możliwości:
- napięcie zasilania: 7,0 - 20,0V,
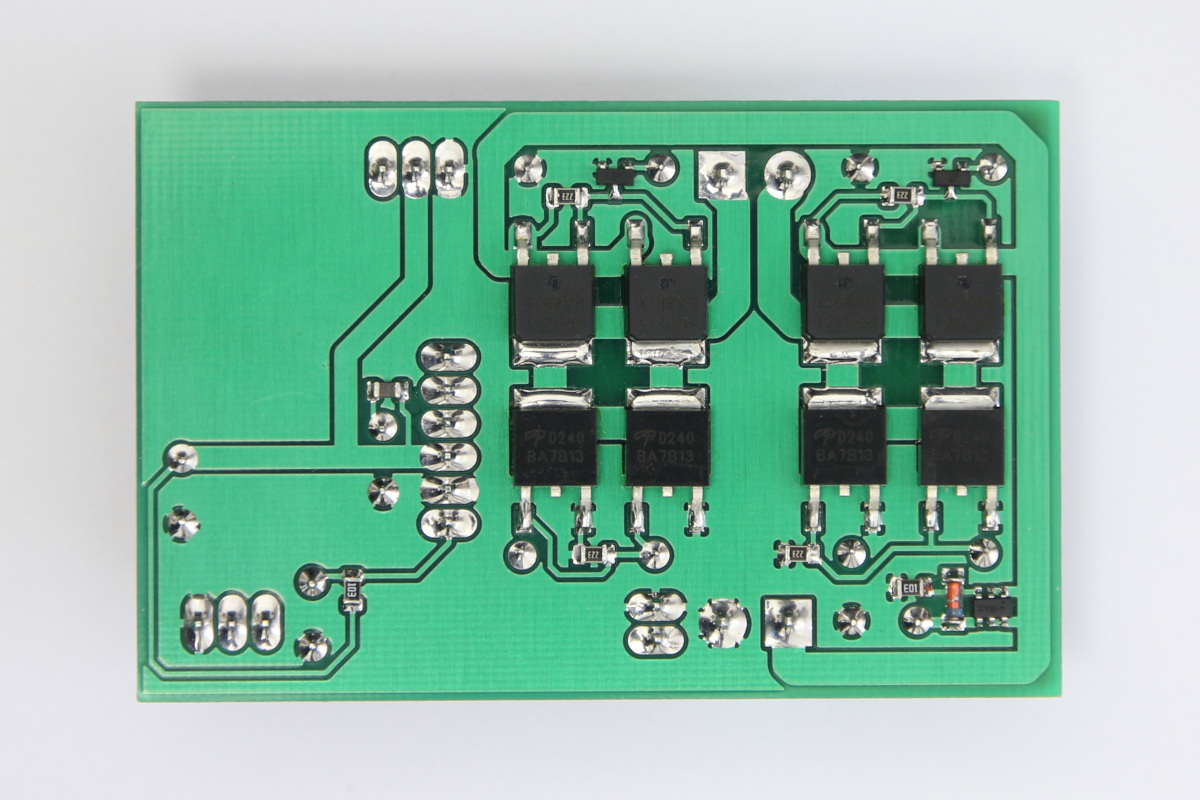
- średnie natężenie prądu: 10A, maksymalne chwilowe natężenie prądu: 140A,
- BEC 5V 1,2A,
- zabezpieczenie przed odwrotną polaryzacją baterii,
- włącznik sterowany poziomem logicznym,
- kalibracja zakresu regulacji z automatycznym zapisem ustawień,
- zabezpieczenie przed włączeniem silnika podczas uruchamiania układu,
- Cut-off, wyłączenie silnika lub redukcja obrotów,
- do wyboru: liniowa i nieliniowa charakterystyka gazu,
- filtr wygładzania regulacji prędkości,
- Fail-safe, wyłączenie silnika w przypadku zaniku sygnału,
- 3 zworki szybkiej konfiguracji,
- hamulec,
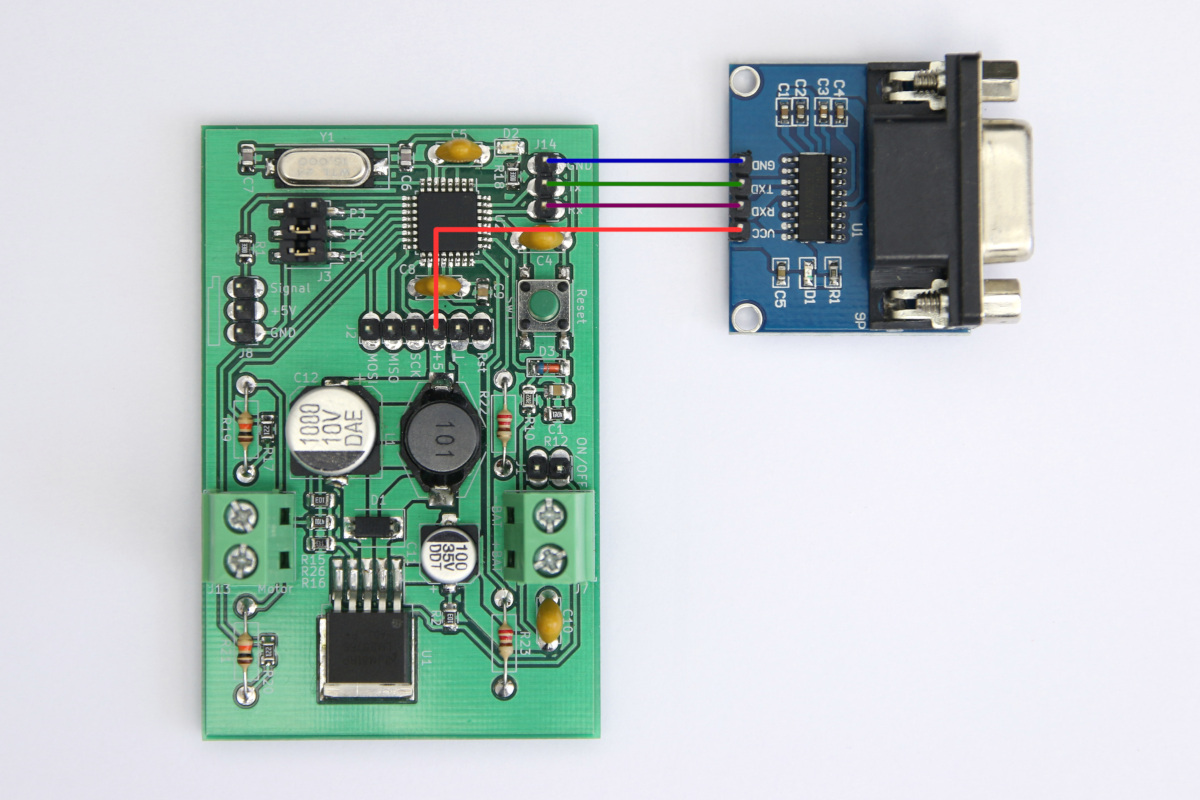
- konfiguracja parametrów przez port szeregowy (9600bps),

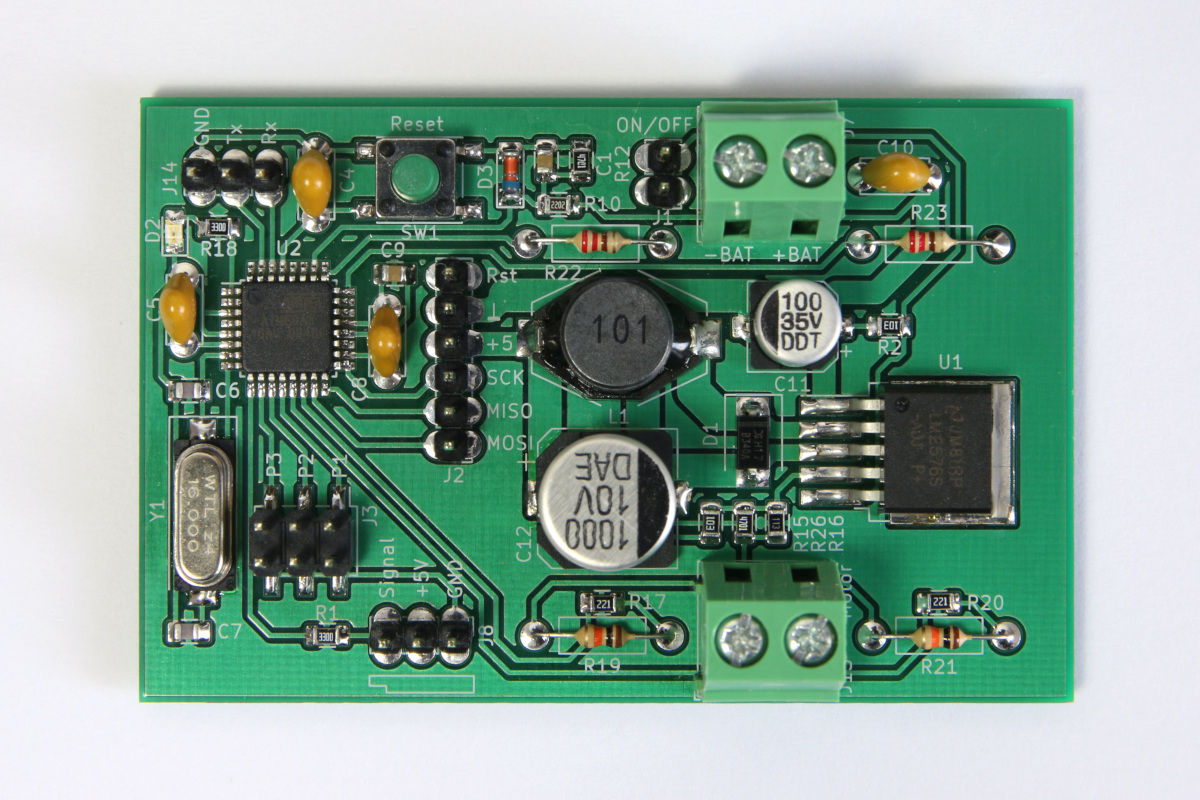
| Zworki szybkiej konfiguracji P1 - P3 (ustawienia zworek należy dokonywać przed włączeniem regulatora). | |
|---|---|
| P1 | Włącza filtr wygładzania zmian prędkości o sile zdefiniowanej komendą @SFC. |
| P2 | Włącza nieliniową charakterystykę regulacji prędkości. Charakterystyka zapisana jest w EEPROM. |
| P3 | Zworka serwisowa. Zwarcie pinów powoduje pominięcie etapu kalibracji oraz skasowanie zapisanych wartości. W trybie serwisowym silnik nie działa. Po zdjęciu zworki i resecie, regulator automatycznie będzie oczekiwał na kalibrację. |
Przebieg kalibracji:
- po włączeniu, regulator oczekuje na poprawny sygnał z odbiornika,
- przez ok. 1 sekundę drążek powinien znajdować się w pozycji środkowej (neutralnej),
- należy wychylić drążek do pozycji skrajnej (maksimum) na co najmniej 1 sekundę,
- podobnie, wychylić drążek w drugą skrajną pozycję (minimum),
- wartości kalibracji zostają automatycznie zapisane,
- przez ok. 1 sekundę drążek powinien znajdować się w pozycji środkowej aby regulator przeszedł w stan gotowości.
Zmiana kolejnych etapów kalibracji sygnalizowana jest przez diodę LED. Ciągłe świecenie oznacza stan gotowości lub stan serwisowy (jeśli założona jest zworka P3). Wymuszenie ponownej kalibracji następuje po uruchomieniu regulatora w trybie serwisowym.
| Komendy terminala. | |
|---|---|
| ? | Wyświetlenie dostępnych komend. |
| @VER | Informacja o wersji oprogramowania. |
| @ERR | Informacja (bitowa) o napotkanych błędach. |
| @ERC | Wyczyszczenie informacji o błędach. |
| @MDS | Zmienia tryb wyświetlania komunikatów terminala. Stan aktywny, powoduje pominięcie opisów polecenia, wyświetlane są tylko wartości. Opcja może być pomocna przy wykorzystaniu portu szeregowego jako źródła danych dla telemetrii |
| @CHL | Ostatnia odczytana wartość sygnału sterującego z nadajnika wyrażona w taktach timera (4µs). |
| @CHV | Wartość sygnału sterującego z nadajnika, przekazana do wykonania. |
| @CHR | Aktualna kalibracja kanału, wartości dla położeń skrajnych i środkowego. |
| @BVV | Wartość napięcia baterii, odczytana z przetwornika A/D oraz wartość wyrażona a woltach. |
| @BVC | Napięcie Cut-off. Domyślnie 170. |
| @BVC < 1-255 > | Ustawienie napięcie Cut-off wg. skali przetwornika A/D. |
| @BVD | Dzielnik użyty do wyliczenia wartości napięcia w woltach. Domyślnie 18. |
| @BVD < 1-100 > | Ustawienie wartości dzielnika. |
| @BSL | Wartość ograniczenia prędkości po wykryciu rozładowania baterii (Cut-off). Domyślnie 128. |
| @BSL < 0-255 > | Ustawienie wartość ograniczenia prędkości (Cut-off). |
| @SFC | Aktualna wartość filtra wygładzającego zmiany prędkości. Domyślnie 5. |
| @SFC < 2-10 > | Ustawienie filtra wygładzającego zmiany prędkości. |
| @MBE < 1, 0 > | Aktywowanie / dezaktywowanie hamulca. |
Pliki
Najnowsze wersje można pobrać z GitHub
Dodaj komentarz